Kitajski visokokakovostni robot za varjenje MIG za varjenje nerjavečega jekla







Robotovsko telo
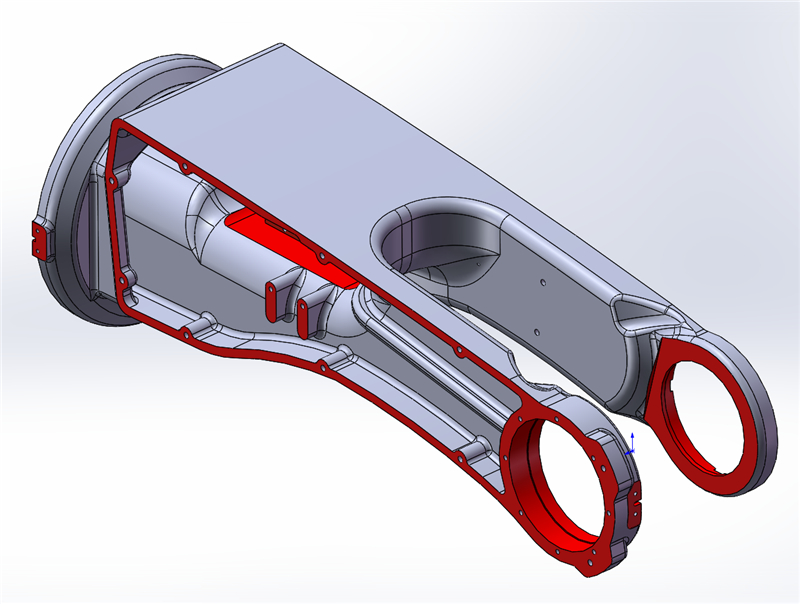
Robot JHY se spreminja predvsem v postopku tlačnega litja in podrobni zasnovi telesa. Naša ekipa za raziskave in razvoj je uvedla veliko inovacij pri zasnovi telesa robota in ima v lasti več kot deset novih patentov za izume.
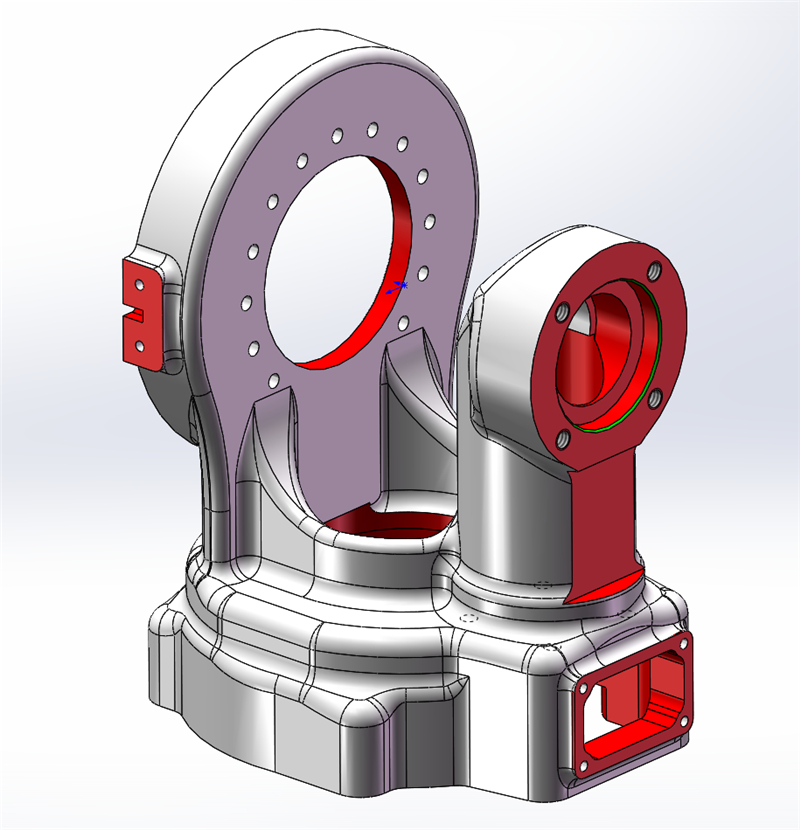
Na primer, šesta os je razvila visoko natančen prenosni mehanizem in zasnovala ojačitvene palice, izhodni disk šestega kolesa pa je zasnovan brez zobnikov, kar je močno izboljšalo natančnost in stabilnost robota. Tudi če varilni gorilnik deluje v težkem položaju, lahko še vedno zagotovi stabilnost brez tresenja. To so potrdile tudi naše domače stranke.
Telo robota je izdelano s tehnologijo tlačnega litja, zaradi česar so naši roboti z visoko gostoto lažji. Prednji del je lahko ožji in daljši, razmerje med zgornjim delom roke in prednjim delom roke je bližje zlatemu reza, zato se premikajo bolj fleksibilno in hitreje.
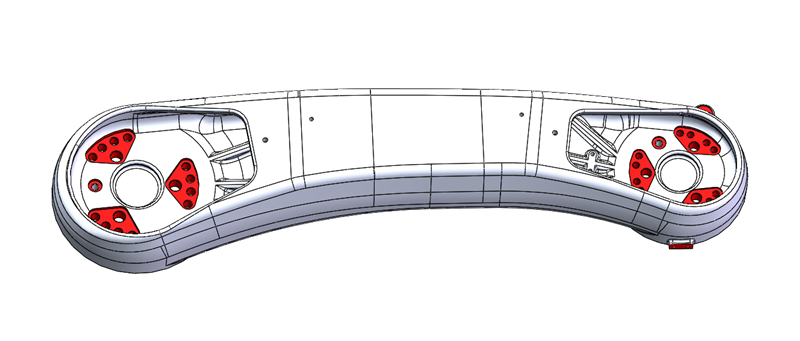
Oblikovanje orisa
Zasnova ravne robotske prednje roke je preprostejša in elegantnejša. Z občutkom za oblikovanje je bolj v skladu z estetiko evropskega trga. Zasnova robotskega telesa je bila deležna številnih tehničnih patentov, novo robotsko telo pa je bolj dovršeno.
Najboljša znamka žic
Notranje žice in priključke robota izdelujejo vodilne japonske blagovne znamke: DYEDEN, TAIYO, enako kot ABB in Fanuc.
Terminal: italijanska znamka Yierma.
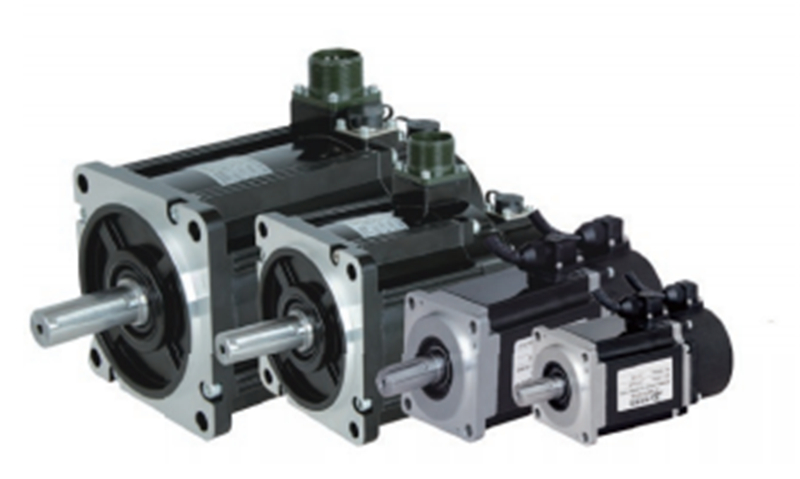
Vodilne blagovne znamke servo motorjev / gonilnikov / reduktorjev
Vsi uporabljajo vodilne kitajske blagovne znamke. Vsaka blagovna znamka je bila pred končno odločitvijo dolgo časa preizkušena in raziskana, da bi zagotovili, da so te blagovne znamke primerne za uporabo naših robotov ter da sta njihova kakovost in delovanje stabilni in zanesljivi.
Osi J1 in J2 imata zasnovo treh ekscentričnih gredi z navorom do 65 Nm, kar zmanjšuje obrabo zobnika in podaljšuje življenjsko dobo reduktorja. Reduktorji osi J1 in J3 robota JHY so trenutno najvišje konfiguracije na Kitajskem.
Glede servo motorja, zdaj za robote uporabljamo največ 3kw motor.
Pri robotih velikosti 1,8 m in 2 m je pogonska sila, potrebna za 1. in 2. os, večja, višje pa so tudi zahteve glede moči motorja.
Visoko natančni in večspecifikacijski motorji lahko v celoti zadovoljijo zahteve aplikacij za našega robota.

3 leta/7500 ur brez vzdrževanja
Vzdrževanje je preprosto, stranke lahko same enostavno upravljajo.
Drugi patenti in modeli
6-osni sekundarni menjalnik Spremenjeno v dve jermenski povezavi, povečano prestavno razmerje in rešena težava prehitrega in nenatančnega premikanja 6-osnega sistema. Izhodni disk šeste osi je zasnovan brez zobnikov, z visoko natančnim prenosnim mehanizmom, kar izboljša natančnost gibanja šeste osi ... Trenutno imamo več kot 30 sorodnih patentov za varilnega robota.
Videoposnetek
Parametri
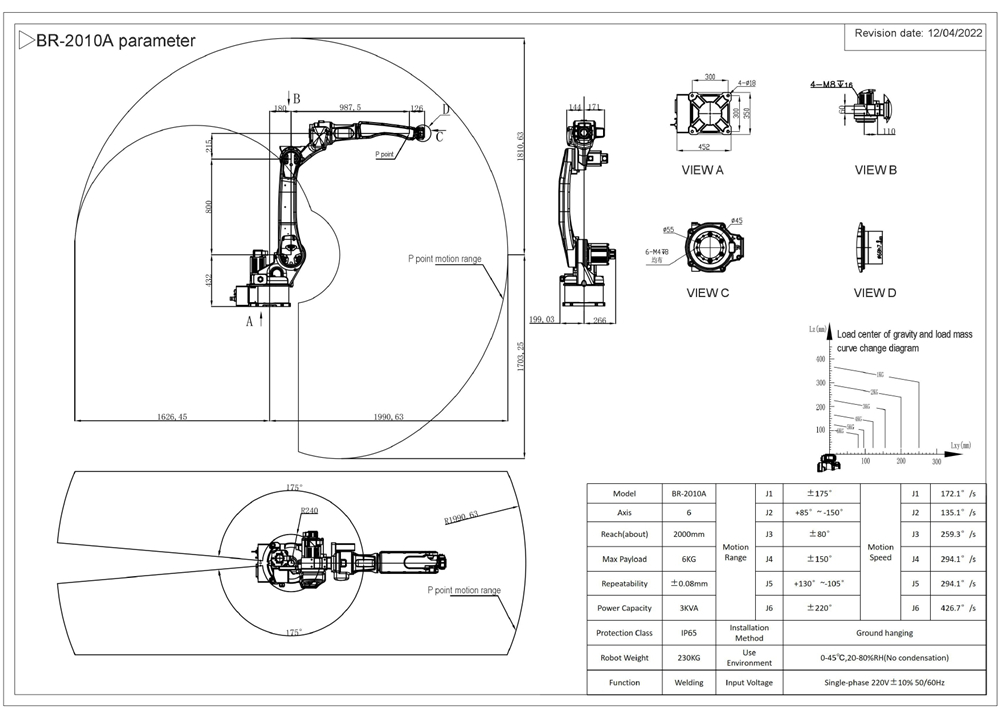
| Model | BR-2010A | Območje gibanja | J1 | ±175° | Hitrost gibanja | J1 | 172,1°/s |
| Os | 6 | J2 | +85°~ -150° | J2 | 135,1°/s | ||
| Doseg (približno) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Največja koristna obremenitev | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Ponovljivost | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Moč | 3 kVA | J6 | ±220° | J6 | 426,7°/s | ||
| Razred zaščite | IP65 | Način namestitve | Viseče | ||||
| Teža robota | 230 kg | Uporabi okolje | 0–45 ℃, 20–80 % relativne vlažnosti (brez kondenzacije) | ||||
| Funkcija | Varjenje | Vhodna napetost | Enofazni 220 V ± 10 % 50/60 Hz | ||||
Kategorije izdelkov
-

6-osni robot za varjenje MIG z nizkim brizganjem, doseg 1800 mm
-

6-osni MIG MAG varilni robot, doseg 1500 mm z ...
-

Visokokakovosten varilni robot, ki se uporablja za varjenje pohištva
-

JHY 6-osna robotska roka industrijski avtomatski obločni ...
-

Varilni robot z dosegom 2000 mm za varjenje ogljikovih jeklenk...
-

MIG varilni robot z razponom 2000 mm za nerjaveče jeklo...